Built for operational use
The Operator Console is a service architecture. Every function – Mission Control, fleet management, detection, streaming – runs as a standalone service. Deployment is local, without any cloud dependency.
On-Premise
Docker-based deployment at a command center or edge node. Full control over infrastructure and data.
Service Architecture
Separated services that can be updated and scaled independently.
Real Time
Telemetry, detections and status data are processed in real time and distributed to all operators.
Zero Trust
Encrypted connections and role-based access control as a baseline.
Offline-Capable
Maps, models and mission data are stored locally. The system is operational without an internet connection.
Data Sovereignty
All data stays with the operator. No external dependencies, no data leaving to third parties.
Central mission control
Operations are planned and monitored directly on the map. Waypoints, scan zones and mission phases can be reviewed before launch and adjusted during operation.
- Interactive map view with real-time overlay
- Drag & drop waypoint planning
- Scan mission logic for systematic area coverage
- Mission orchestrator for automated workflows
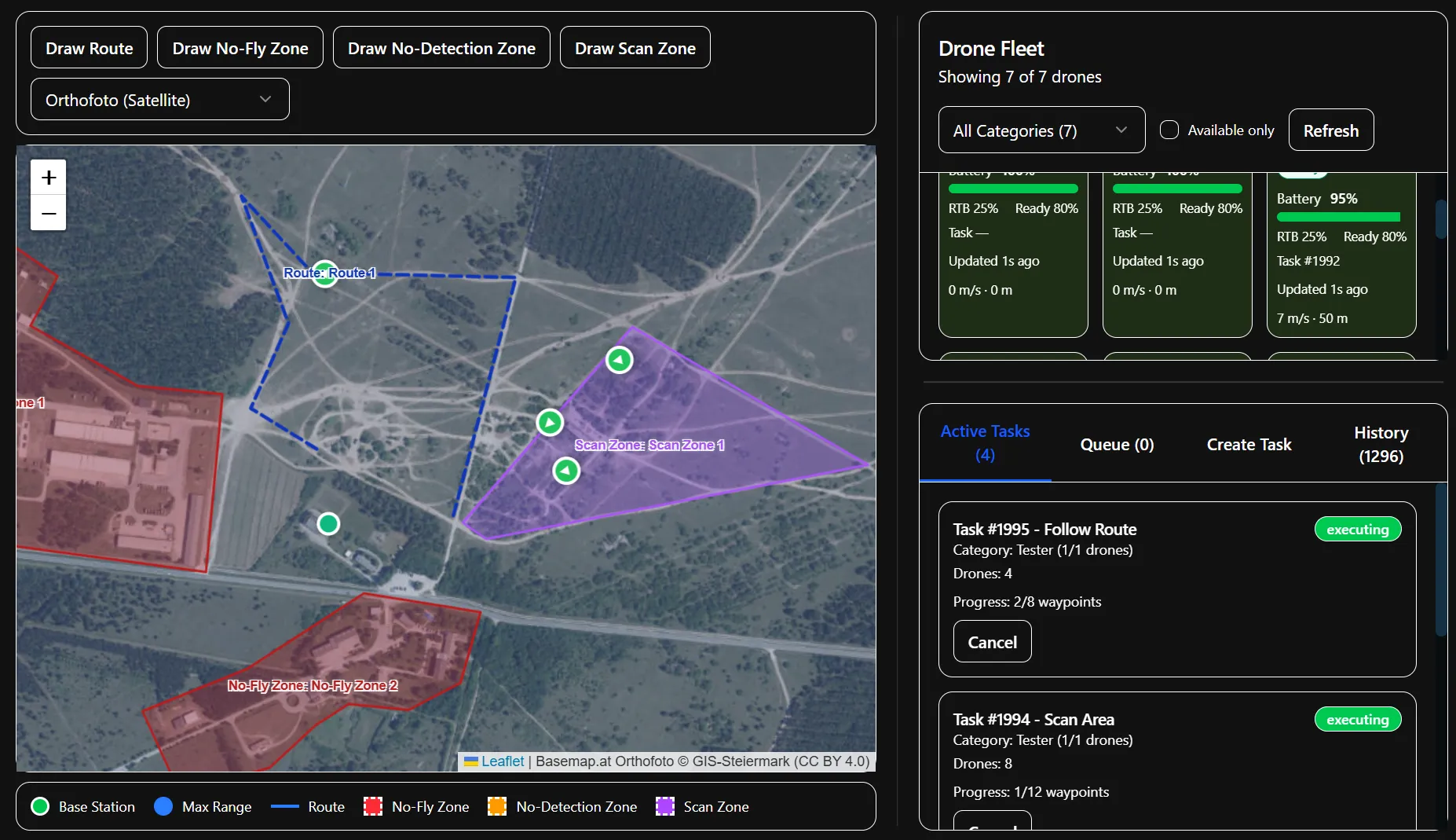
Mission Control interface (as of Apr 2026)
Multi-drone coordination
The system coordinates multiple drones in parallel. Status data such as battery, position and speed is brought together in a shared overview.
- 50+ drones tested in simulation
- Real-time telemetry: GPS, battery, heading, speed
- Automatic rotation operation
- Vendor-independent through MAVLink abstraction

Swarm test – multi-drone coordination
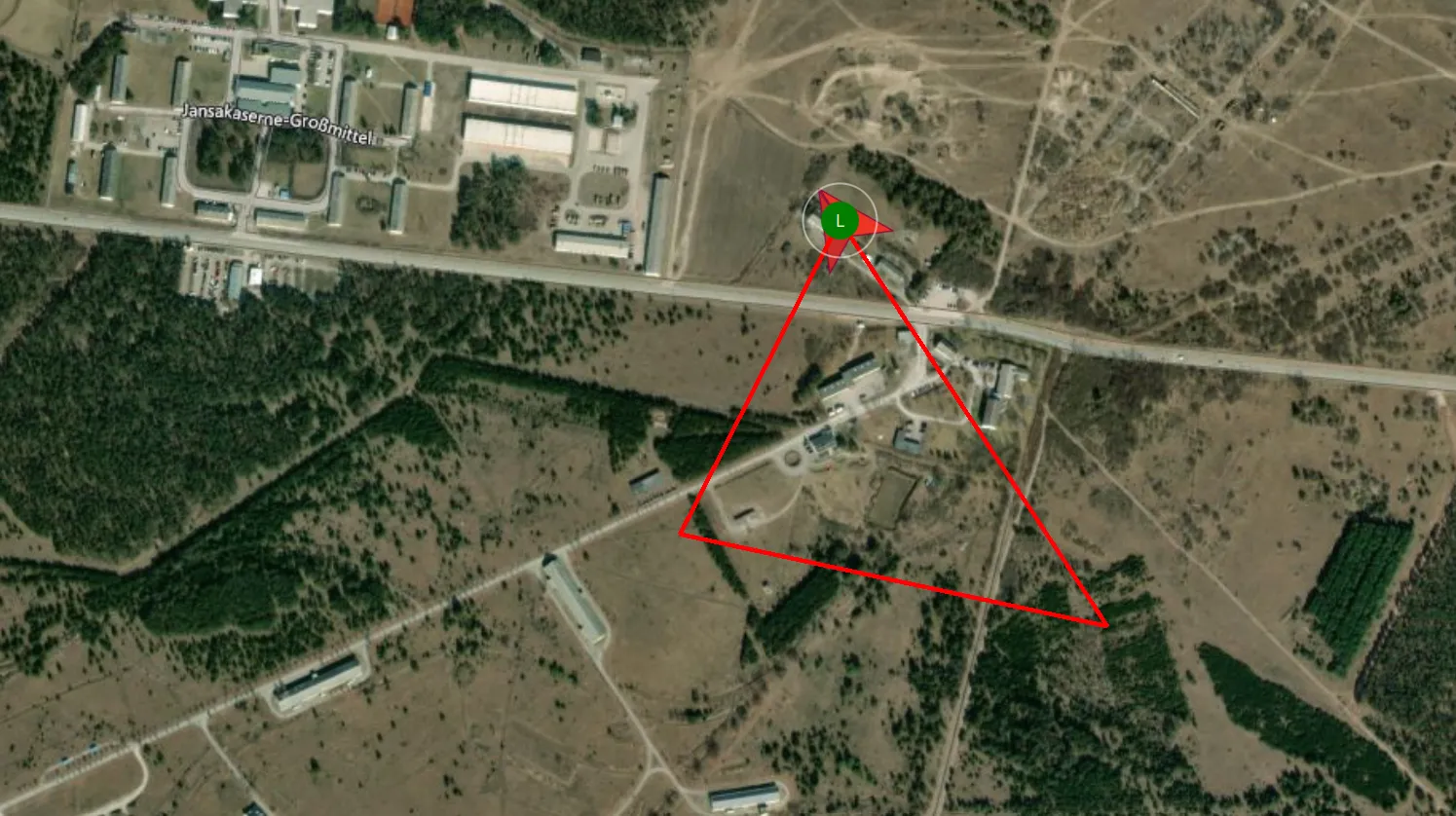
Real-time situational picture
The live map shows units and detections in real time. POIs are aggregated, prioritized and escalated when needed.
- Real-time position of all drones and operators
- POI aggregation prevents duplicate alerts
- Prioritization & escalation
- Categorization by type and confidence
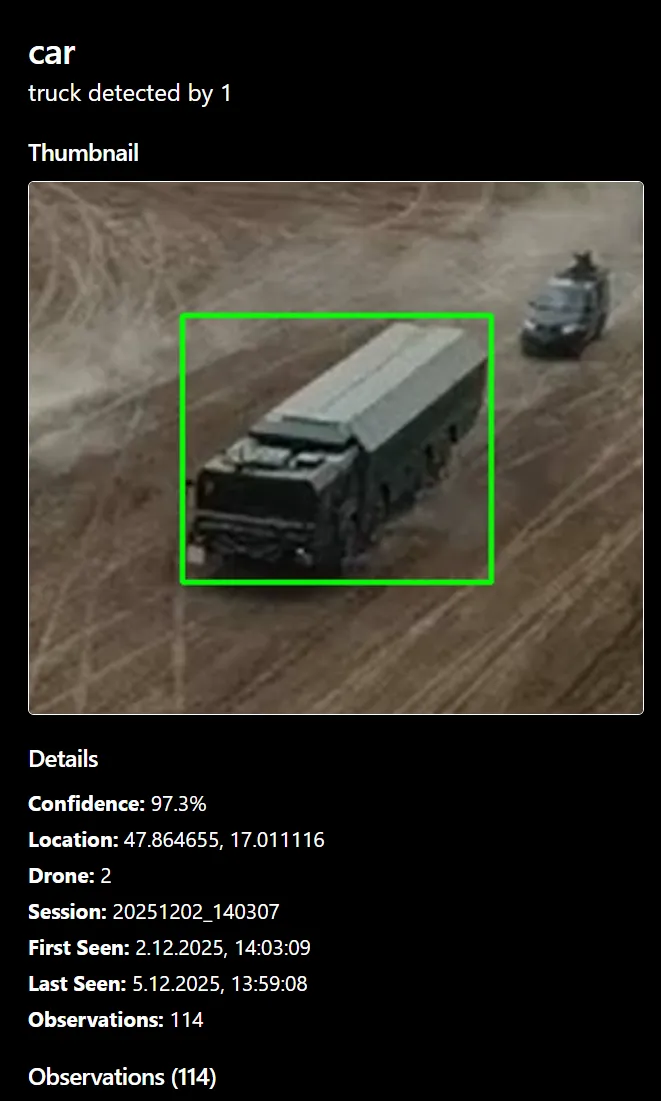
POI Library – event management
Trainable detection pipeline
The pipeline marks relevant detections in the video stream. Models are retrained for new object classes depending on the mission profile.
- Live detection directly in the video stream
- Trainable models for new object classes
- Optical & infrared
- Executed locally – no cloud dependency
Mobile operating mode
The mobile view for personnel in the field. Positions, POIs and feedback are transmitted to the station operator in real time.
- Handheld-optimized for smartphones and tablets
- Real-time position to the station operator
- Direct access to detections and POIs
- Lifecycle management – add, assign, remove

Handheld mode – field operator interface
Fully operational without an internet connection
Maps, AI models, mission data and communication run locally. The system is designed for environments where no external connection is available or desired.
- Local map data – no external tile server required
- On-device AI models – detection without cloud connectivity
- Local communication – station and field operators on their own network
- Edge-capable – operation on compact hardware in the field
Open standards & interfaces
APIs and open protocols enable connection to existing command and third-party systems.
- REST API for external system integration
- MAVLink for vendor-independent drone control
- Data export & audit trails for compliance
MAVLink PoC – external validation with QGroundControl
Interested in a technical demonstration?
On-site demonstrations in Austria are available. Detailed material is available on request.
Contact us