Aufgebaut für den Einsatz
Die Operator Console ist eine Service-Architektur. Jede Funktion – Mission Control, Flottenmanagement, Detektion, Streaming – läuft als eigenständiger Dienst. Deployment erfolgt lokal, ohne Cloud-Abhängigkeit.
On-Premise
Docker-basiertes Deployment im Zentrum oder am Edge-Knoten. Volle Kontrolle über Infrastruktur und Daten.
Service-Architektur
Getrennte Dienste, unabhängig aktualisierbar und skalierbar.
Echtzeit
Telemetrie, Detektionen und Statusdaten werden in Echtzeit verarbeitet und an alle Operatoren verteilt.
Zero Trust
Verschlüsselte Verbindungen und rollenbasierte Zugriffskontrolle als Grundlage.
Offline-fähig
Karten, Modelle und Missionsdaten liegen lokal. Das System ist ohne Internetverbindung einsatzfähig.
Datenhoheit
Alle Daten bleiben beim Betreiber. Keine externen Abhängigkeiten, kein Datenabfluss an Dritte.
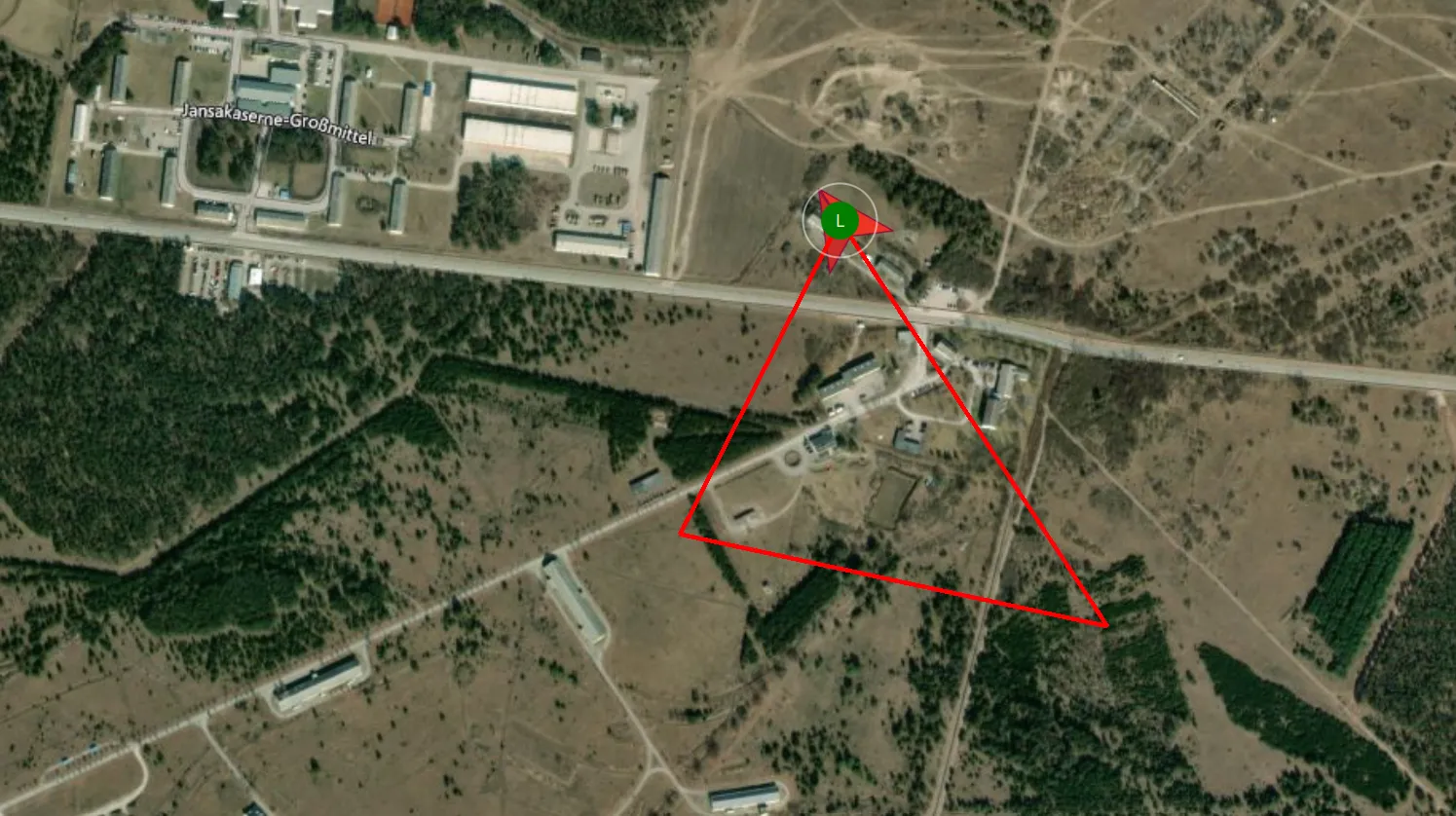
Zentrale Missionssteuerung
Einsätze werden direkt auf der Karte geplant und überwacht. Wegpunkte, Scan-Zonen und Missionsphasen lassen sich vor dem Start prüfen und im laufenden Betrieb anpassen.
- Interaktive Kartenansicht mit Echtzeit-Overlay
- Drag & Drop Wegpunktplanung
- Scan-Mission-Logik für systematische Flächenabdeckung
- Mission Orchestrator für automatisierte Abläufe
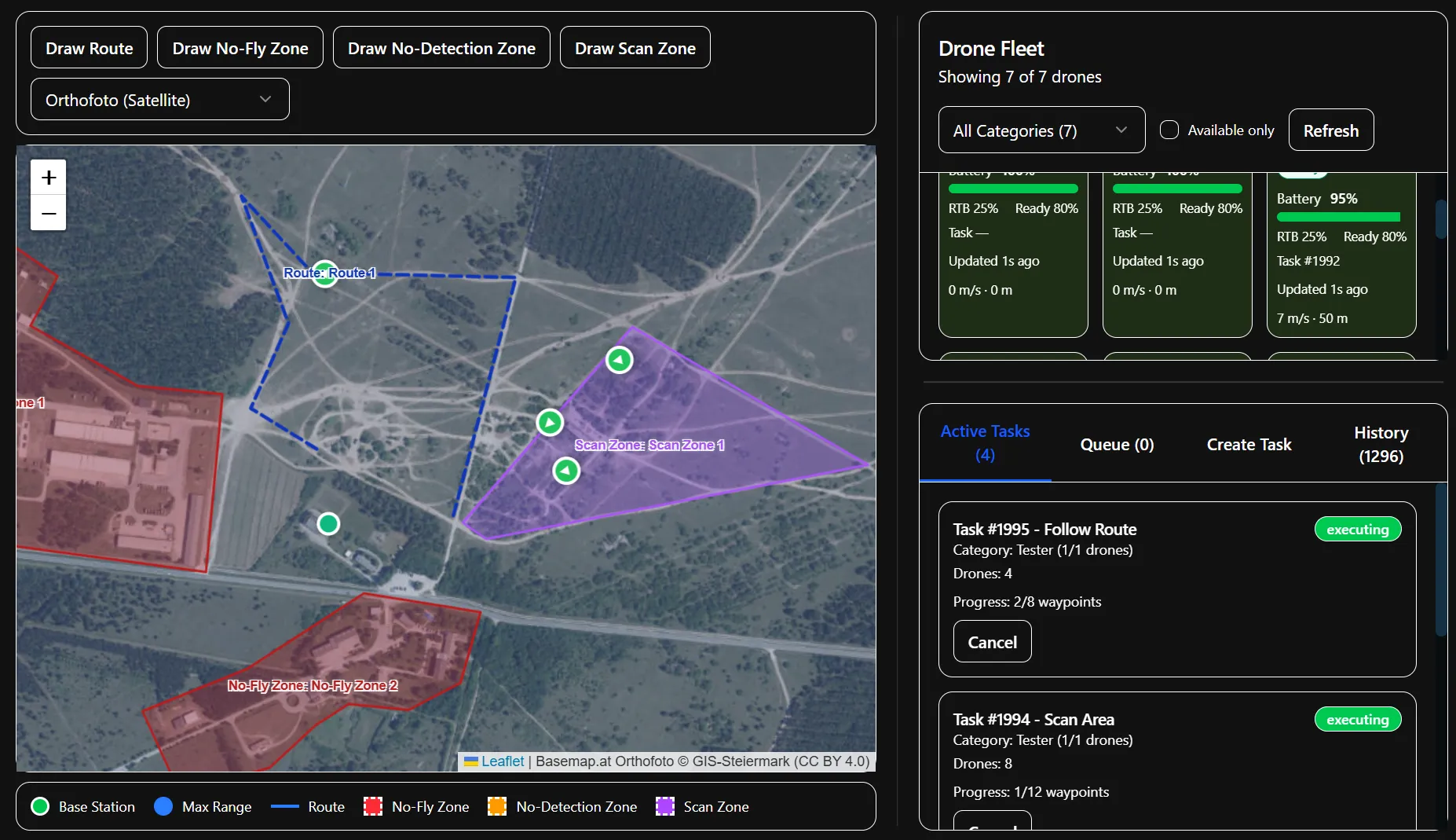
Mission Control Interface (Stand: Apr. 2026)
Multi-Drohnen-Koordination
Das System koordiniert mehrere Drohnen parallel. Statusdaten wie Batterie, Position und Geschwindigkeit sind in einer gemeinsamen Übersicht zusammengeführt.
- 50+ Drohnen in Simulation getestet
- Echtzeit-Telemetrie: GPS, Batterie, Heading, Speed
- Automatischer Rotationsbetrieb
- Herstellerunabhängig über MAVLink-Abstraktion

Swarm Test – Multi-Drohnen-Koordination
Echtzeit-Lagebild
Die Live-Karte zeigt Einheiten und Detektionen in Echtzeit. POIs werden aggregiert, priorisiert und bei Bedarf eskaliert.
- Echtzeitposition aller Drohnen und Operatoren
- POI-Aggregation verhindert Alarm-Duplikate
- Priorisierung & Eskalation
- Kategorisierung nach Typ und Konfidenz
POI Library – Ereignisverwaltung
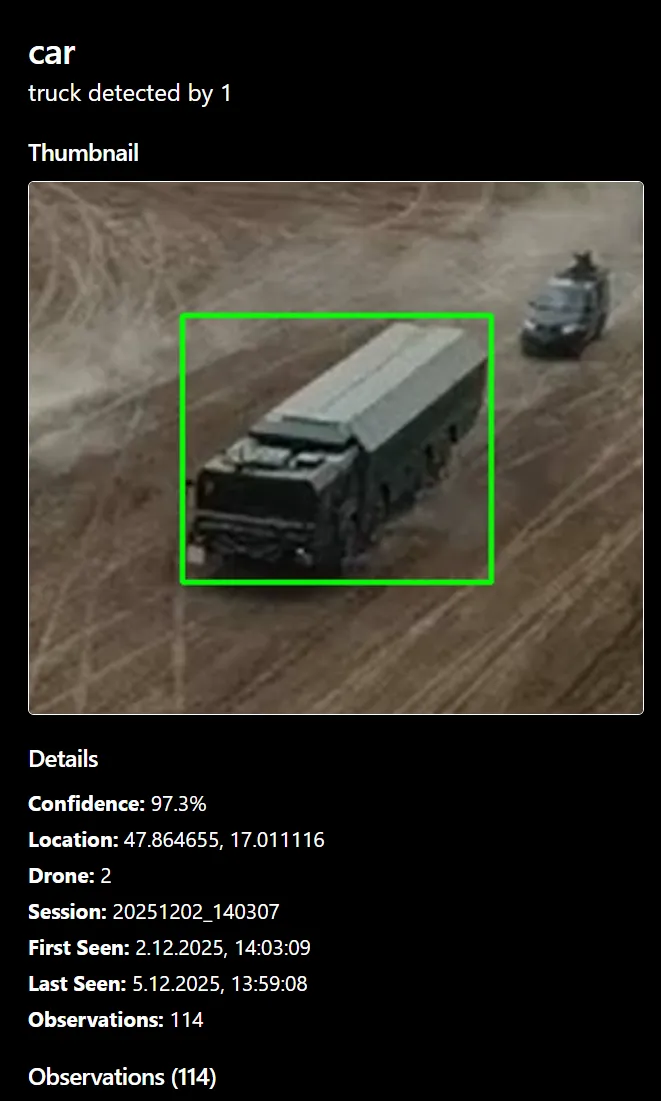
Trainierbare Detection Pipeline
Die Pipeline markiert relevante Erkennungen im Videostream. Modelle werden je nach Einsatzprofil für neue Objektklassen nachtrainiert.
- Live-Erkennung direkt im Videostream
- Trainierbare Modelle für neue Objektklassen
- Optisch & Infrarot
- Lokal ausgeführt – keine Cloud-Abhängigkeit
Mobiler Einsatzmodus
Die mobile Ansicht für Kräfte im Feld. Positionen, POIs und Rückmeldungen werden in Echtzeit an den Station Operator übermittelt.
- Handheld-optimiert für Smartphones und Tablets
- Echtzeit-Position an den Station Operator
- Direkter Zugriff auf Detektionen und POIs
- Lifecycle-Management – Hinzufügen, Zuordnen, Entfernen

Handheld Mode – Field Operator Interface
Vollständig einsatzfähig ohne Internetverbindung
Karten, KI-Modelle, Missionsdaten und Kommunikation laufen lokal. Das System ist für Umgebungen konzipiert, in denen keine externe Verbindung verfügbar oder gewünscht ist.
- Lokale Kartendaten – kein externer Tile-Server erforderlich
- KI-Modelle on-device – Detektion ohne Cloud-Anbindung
- Lokale Kommunikation – Station Operator und Field Operator im eigenen Netz
- Edge-fähig – Betrieb auf kompakter Hardware im Feld
Offene Standards & Schnittstellen
APIs und offene Protokolle ermöglichen die Anbindung an bestehende Leit- und Drittsysteme.
- REST API für externe Systemintegration
- MAVLink für herstellerunabhängige Drohnensteuerung
- Datenexport & Audit-Trails für Compliance
MAVLink PoC – Externe Validierung mit QGroundControl
Interesse an einer technischen Demonstration?
On-Site-Demonstrationen in Österreich sind möglich. Detaillierte Unterlagen auf Anfrage verfügbar.
Kontakt aufnehmen